System Integration Solutions
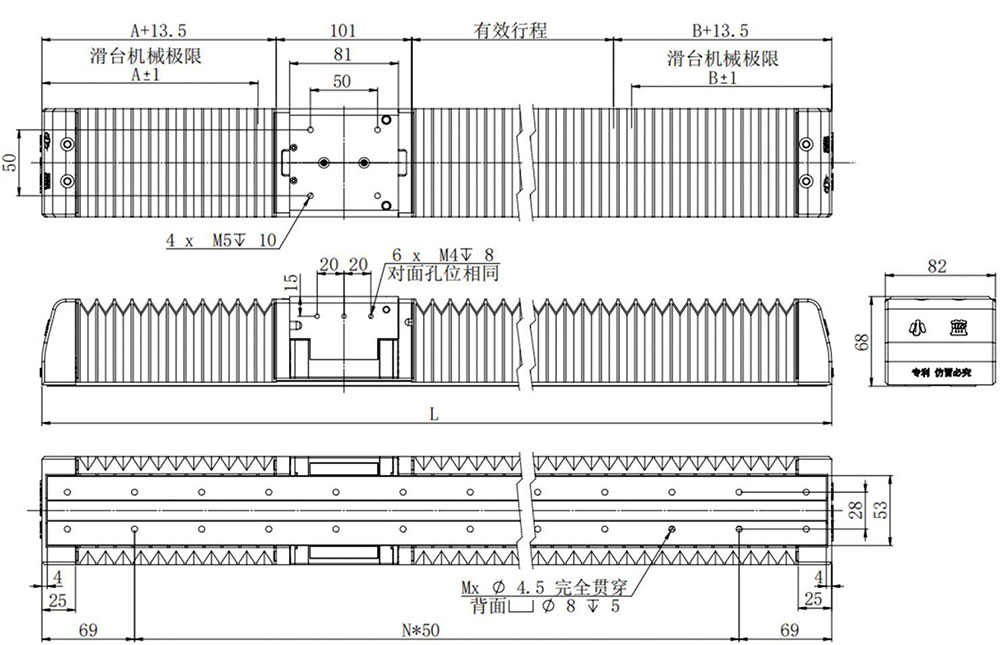
Compact Precision Linear Module
- Simple assembly
- Achieve ±3um accuracy without linear encoder
- Lower cost (compared to traditional linear motors)
- Simple assembly
- Achieve ±3um accuracy without linear encoder
- Lower cost (compared to traditional linear motors)

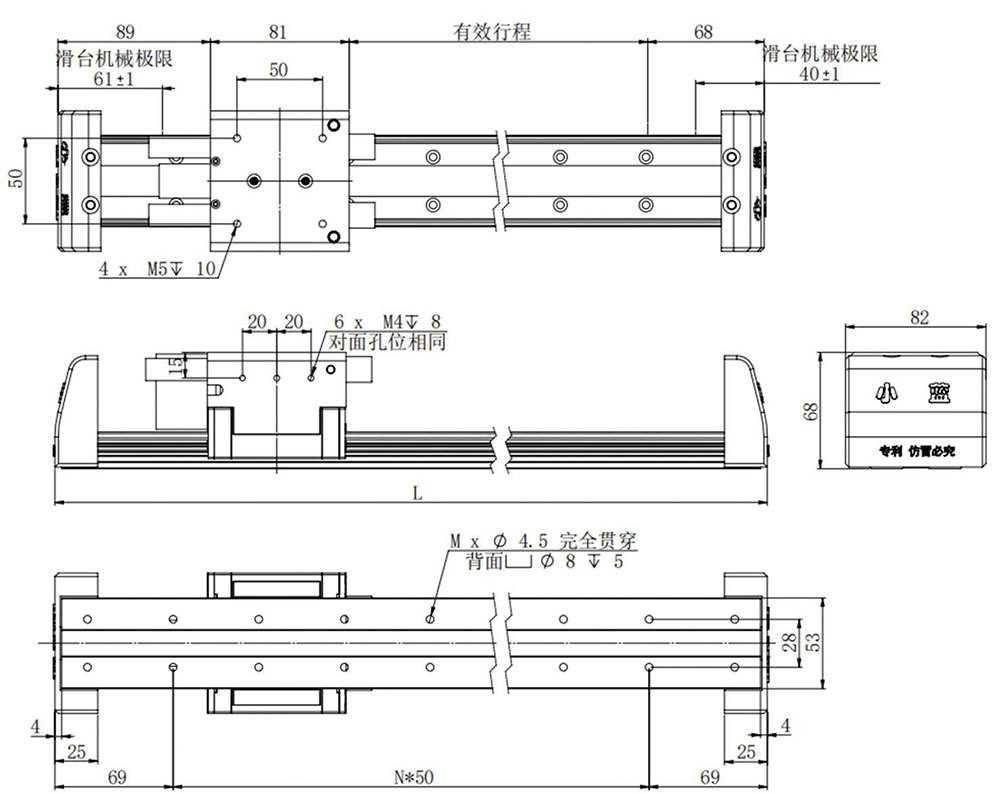
POWER RAIL standard
PRAC Series

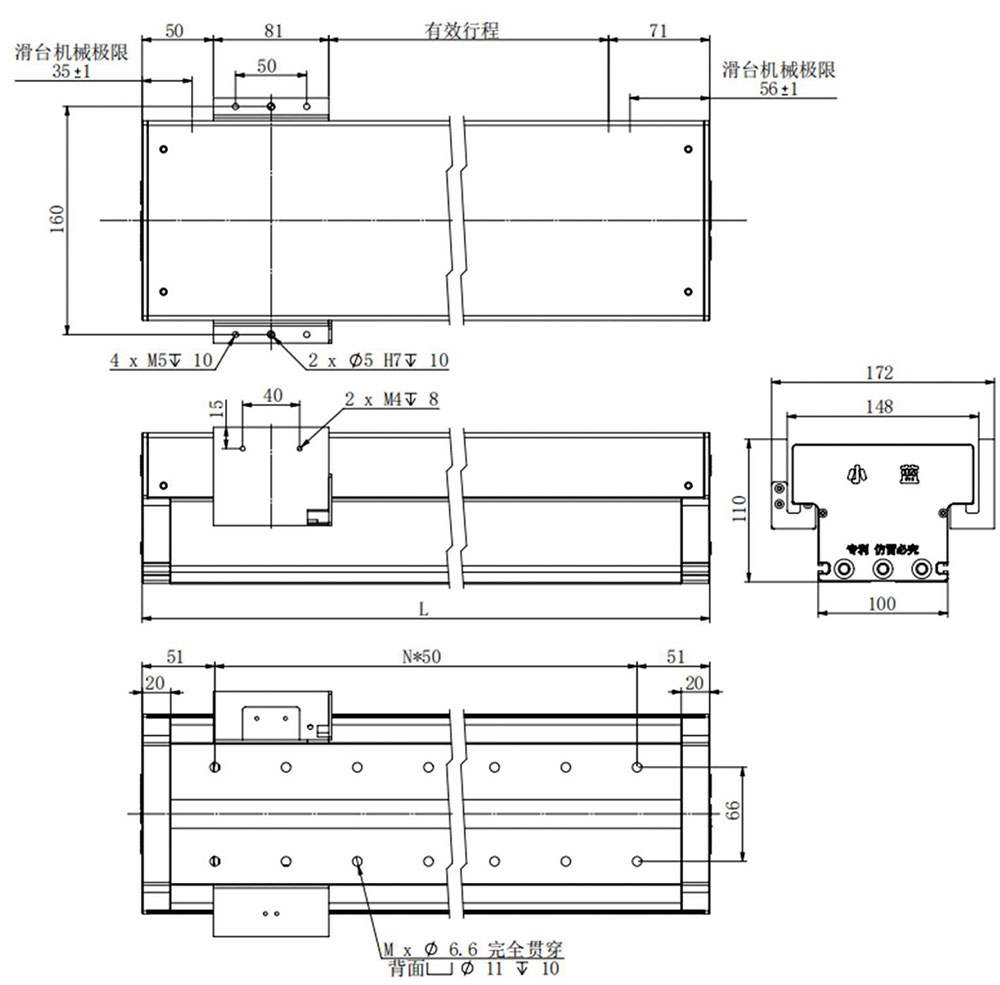
POWR RAIL cover plate
PRGC Series
POWER RAIL Organ shield
PRBC Series
PRAC03
POWER RAIL standard
PRAC Series
Parameters
| Item | Symbol | Unit | PR31-H |
|---|---|---|---|
| Continuous thrust | Fe | N | 35 |
| Continuous current | Ic | Arms | 1.5 |
| Instantaneous thrust [1s] | Fp | N | 70 |
| Instantaneous current [1s] | Ip | Arms | 3.1 |
| Thrust constant | Kf | N/Arms | 23.4 |
| Suction between stator and forcer | Fa | N | 150 |
| Max. coil temperature | Tmax | ℃ | 125 |
| Electrical time constant | Ke | ms | 5.5 |
| Resistance [between lines, 25℃] | R25 | R | 7.4 |
| Inductance [between lines] | L | Mn | 41 |
| Class distance | 2τ | mm | 24 |
| Motor wire winding radius | Rbend | mm | 40 |
| Counter EMF Constant | Kv | Vrms/[m/s] | 28 |
| Motor constant [between lines, 25°C] | Km | N2/W | 47 |
| Thermal resistance | RTH | ℃/W | 2.5 |
| Thermal Sensing Switch | - | - | PT100 (thermal resistor) |
| Max. operating voltage | V | VDC | 600 |
| Forcer mass | Mf | Kg | 1.719 |
| Forcer length | L | mm | 81 |
| Stator unit mass | Ms | Kg/m | 8.225 |
| Max. carrying weight | mmax | Ks | 2 |
| No-load top speed | Vmax | m/s | 4 |
| No-load Max. acceleration | amax | m/s2 | 25 |
Accuracy
| Category | Effective Stroke 100-1000 | Effective Stroke 1001-2000 | Effective Stroke 2001-3750 |
|---|---|---|---|
| YT1 | ±3 | ±3 | ±3 |
PRGC03
POWR RAIL cover plate
PRGC Series
Parameters
| Item | Symbol | Unit | PR31-H |
|---|---|---|---|
| Continuous thrust | Fe | N | 35 |
| Continuous current | Ic | Arms | 1.5 |
| Instantaneous thrust [1s] | Fp | N | 70 |
| Instantaneous current [1s] | Ip | Arms | 3.1 |
| Thrust constant | Kf | N/Arms | 23.4 |
| Suction between stator and forcer | Fa | N | 150 |
| Max. coil temperature | Tmax | ℃ | 125 |
| Electrical time constant | Ke | ms | 5.5 |
| Resistance [between lines, 25℃] | R25 | R | 7.4 |
| Inductance [between lines] | L | Mn | 41 |
| Class distance | 2τ | mm | 24 |
| Motor wire winding radius | Rbend | mm | 40 |
| Counter EMF Constant | Kv | Vrms/[m/s] | 28 |
| Motor constant [between lines, 25°C] | Km | N2/W | 47 |
| Thermal resistance | RTH | ℃/W | 2.5 |
| Thermal Sensing Switch | - | - | PT100 (thermal resistor) |
| Max. operating voltage | V | VDC | 600 |
| Forcer mass | Mf | Kg | 2.719 |
| Forcer length | L | mm | 81 |
| Stator unit mass | Ms | Kg/m | 8.225 |
| Max. carrying weight | mmax | Ks | 1 |
| No-load top speed | Vmax | m/s | 4 |
| No-load Max. acceleration | amax | m/s2 | 15 |
Accuracy
| Category | Effective Stroke 100-1000 | Effective Stroke 1001-2000 | Effective Stroke 2001-3750 |
|---|---|---|---|
| YT1 | ±3 | ±3 | ±3 |
PRBC03
POWER RAIL Organ shield
PRBC Series
Parameters
| Item | Symbol | Unit | PR31-H |
|---|---|---|---|
| Continuous thrust | Fe | N | 35 |
| Continuous current | Ic | Arms | 1.5 |
| Instantaneous thrust [1s] | Fp | N | 70 |
| Instantaneous current [1s] | Ip | Arms | 3.1 |
| Thrust constant | Kf | N/Arms | 23.4 |
| Suction between stator and forcer | Fa | N | 150 |
| Max. coil temperature | Tmax | ℃ | 125 |
| Electrical time constant | Ke | ms | 5.5 |
| Resistance [between lines, 25℃] | R25 | R | 7.4 |
| Inductance [between lines] | L | Mn | 41 |
| Class distance | 2τ | mm | 24 |
| Motor wire winding radius | Rbend | mm | 40 |
| Counter EMF Constant | Kv | Vrms/[m/s] | 28 |
| Motor constant [between lines, 25°C] | Km | N2/W | 47 |
| Thermal resistance | RTH | ℃/W | 2.5 |
| Thermal Sensing Switch | - | - | PT100 (thermal resistor) |
| Max. operating voltage | V | VDC | 600 |
| Forcer mass | Mf | Kg | 1.8 |
| Forcer length | L | mm | 81 |
| Stator unit mass | Ms | Kg/m | 8.225 |
| Max. carrying weight | mmax | Ks | 2 |
| No-load top speed | Vmax | m/s | 4 |
| No-load Max. acceleration | amax | m/s2 | 20 |
Accuracy
| Category | Effective Stroke 100-1000 | Effective Stroke 1001-2000 | Effective Stroke 2001-2650 |
|---|---|---|---|
| YT1 | ±3 | ±3 | ±3 |
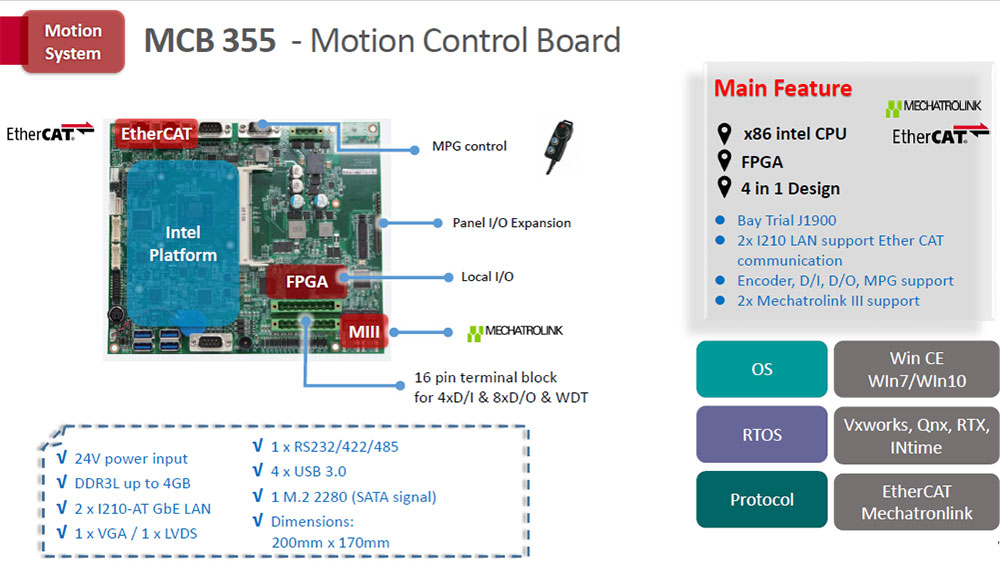
MCB355 Motion Control Board
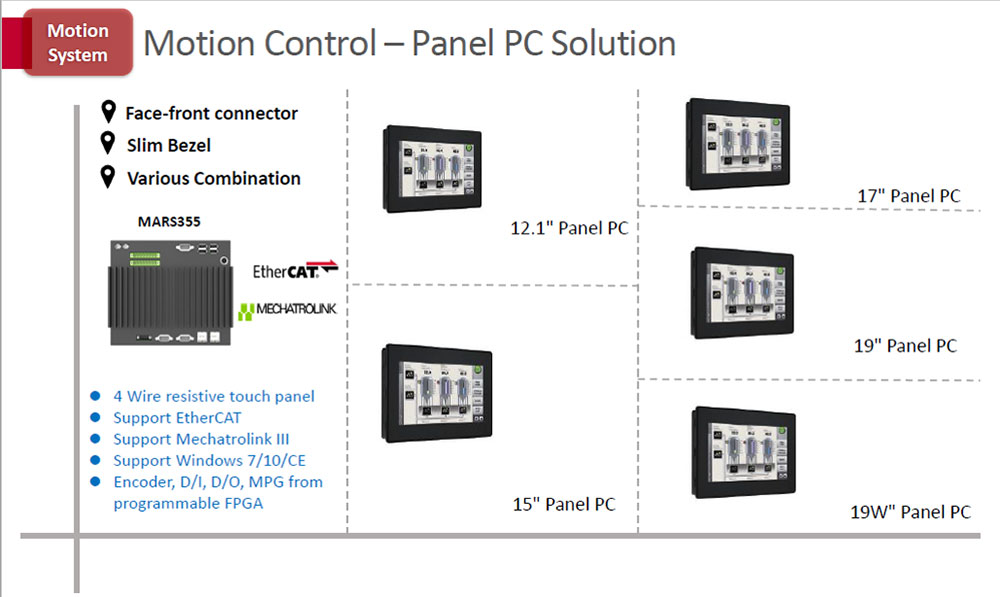
MARS355 Motion Control Board

Panel PC Solution
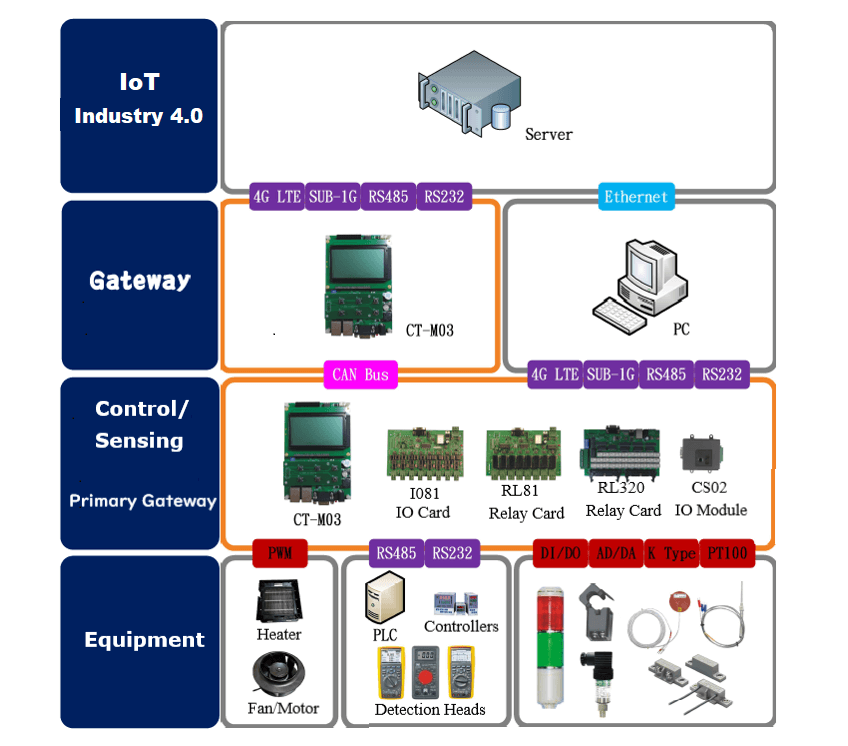
Integration Solutions of Equipment Upgrade& Industry 4.0
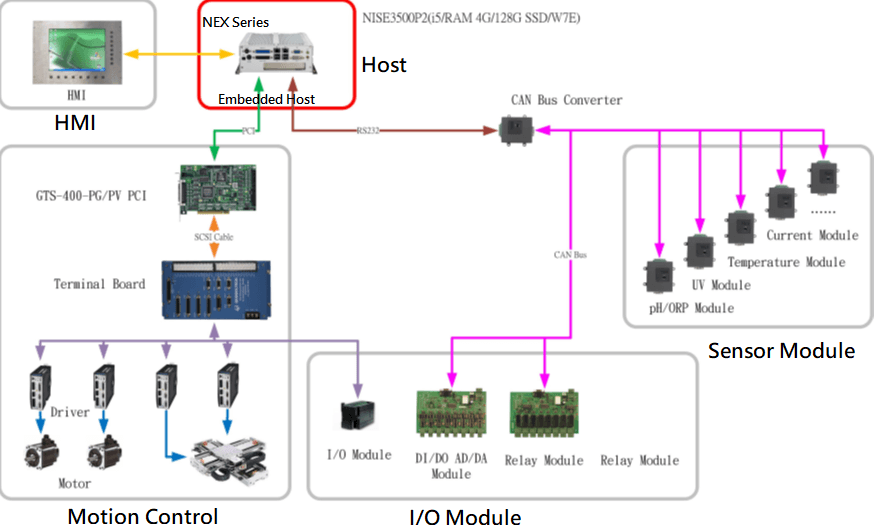
IOT Industry 4.0 Solution Structure
Automation & System Integration Specialized Equipment
Customized loading and unloading automation, high precision positioning platform mechanism design, combined with motion+ vision+ robots
Turnkey Solutions
Mechanical Design
Automation Mechanism
Design
High-precision
Positioning Platform Design
Control System
Mechanical
Vision
System
Motion
Integration
System
Electrical Control
Board
Design
Mechanical Design
automation
Mechanical Design
High-precision Positioning Platform Design
Control System
Mechanical Vision System
Motion Integration System
Electrical Control Board Design
High Precision-Linear Positioning Integration Performance
- Machine name: Laser Scribing Equipment (KF-XY-450-ROBOTSYSYTEM-CONTROLLER-K&Y)
- Work content: whole machine system integration (including mechanism, control, and distribution board)
Specification
| Load (Kg) | 15 |
|---|---|
| Stroke(mm) | X axis: 300 / Y axis: 150 |
| Max. acceleration (m/s*2) | 4.5 |
| Max. speed (m/s) | 0.45 |
| Repeatability (um) | ±0.5 |
| Absolute accuracy (um) | ±2 (after compensation) |
| Flatness (um) | 6 |
| Straightness(um) | 4 |
| Orthogonality (um) | 5 |
| Limit switch | NPN, NC, 12-24V |
| Installation direction | Horizontal |
| Linear motor model | X axis: PE-X4-W2 / Y axis: PB-X5-W1 |
| Continuous thrust (N) | X axis: 263.4 / Y axis: 134.8 |
| Max. thrust (N) | X axis: 1053.4 / Y axis: 539.2 |
| Optical encoder model | Renishaw RGH22, digital, 0.1um |
| Motion control card model | KFRM-4000-NX87 |
| IPC model | GTS-800-PG-VB-Laser |
| I/O expansion module model | ACC-S1616D |
| Drive model | GTHD-006-2AAP1(2PCS) |
| Screen model | ASUS 18.5” VS197TE |
| Keyboard model | WK590 mini keyboard USB |
| Mouse model | Microsoft basic optical USB mouse (warship black) |
- Machine name: Laser Drilling Equipment KF-X400-Y300-V350-ROBOTSYSTEM-0.1um
- Work content: whole machine system integration (including mechanism, control, and distribution board)
Specification
| Load (Kg) | 20 |
|---|---|
| Stroke(mm) | X axis:400 / Y axis:300 |
| Max. acceleration (m/s*2) | full stroke: 2.7 |
| Max. speed (m/s) | full stroke: 0.4 |
| Repeatability (um) | ±0.5 |
| Absolute accuracy (um) | 5(after compensation) |
| Flatness (um) | 8 |
| Straightness(um) | 8 |
| Orthogonality (um) | 10(300x300) |
| Limit switch | NPN, NC, 12-24V |
| Installation direction | Horizontal |
| Linear motor model | X axis:PE-X4-W2 / Y axis:PB-X5-W1 |
| Continuous thrust (N) | X axis:263.4 / Y axis:134.8 |
| Max. thrust (N) | X axis:1053.4 / Y axis:539.2 |
| Optical encoder model | Renishaw RGH28, digital, 0.1um |
| IPC model | KFRM-4000-NX87 |
| Motion control card model | GTS-400-PG-VB |
| I/O expansion module model | ACC-S1616D |
| Drive model | GTHD-006-2AAP1(2PCS) |
| Screen model | ASUS 18.5” VS197DE |
| Keyboard model | WK590 mini keyboard USB |
| Mouse model | Microsoft basic optical USB mouse (warship black) |
- Machine name: Laser Double-Platform Cutting Equipment KF-X800-V350-Y1-600-Y2-600-V450-BRIDGE- UV
- Work content: whole machine system integration (including mechanism, control, and distribution board)

Specification
| Load (Kg) | X axis:50 / Y1,Y2 axis:50 |
|---|---|
| Stroke(mm) | X axis:800 / Y1,Y2 axis:610 / Z axis:50 |
| Max. acceleration (m/s*2) | X axis:4.2 / Y1,Y2 axis:4.2 |
| Max. speed (m/s) | X axis:0.35 / Y1,Y2 axis:0.45 |
| Repeatability (um) | X axis:1 / Y1,Y2 axis:1 |
| Absolute accuracy (um) | X axis:8(after compensation)/ Y1,Y2 axis:5(after compensation) |
| Flatness (um) | X axis:15 / Y1,Y2 axis:10 |
| Straightness(um) | X axis:10 / Y1,Y2 axis:8 |
| Orthogonality (um) | 10(300x300) |
| Limit switch | Omron EE-SX674 |
| Installation direction | X axis:wall mount / Y1,Y2 axis:horizontal |
| Linear motor model | X axis:CB2-80-P / Y1,Y2 axis:CB4-60-SP |
| Continuous thrust (N) | X axis:301.3 / Y1,Y2 axis:396.5 |
| Max. thrust (N) | X axis:848.7 / Y1,Y2 axis:117.4 |
| Z axis motor model | Shihlin Electric, 400W with brake |
| Z-axis ballscrew lead (mm) | 2 |
| Optical encoder model | Renishaw RGH28, incremental digital, 0.1um |
| Motion control card model | GTS-400-PG-VB |
| I/O expansion module model | ACC-S1616D |
| Drive model | GTHD-006-2AAP1(3PCS) |
| Screen model | ASUS 18.5” VS197DE |
| Wireless keyboard& mouse model | Logitech MK240 Nano, black/yellow |
- Machine name: Soft Board Cutting Equipment KF-X700-Y930-V450-BRIDGE-ROBOTSYSTEM_S2S
- Work content: whole machine system integration (including mechanism, control, and distribution board)

Specification
| Load (Kg) | X axis:70 / Y axis:130 |
|---|---|
| Stroke(mm) | X axis:700 / Y axis:930 |
| Max. acceleration (m/s*2) | 4 (full stroke) |
| Max. speed (m/s) | 0.4 (full stroke) |
| Repeatability (um) | ±1 |
| Absolute accuracy (um) | ±2 ( after compensation ) |
| Flatness (um) | ±5 |
| Straightness(um) | ±5 |
| Orthogonality (um) | 10 |
| Settling time (ms) | 450/±5um |
| Installation direction | X axis:wall mount / Y axis:horizontal |
| Linear motor model | X axis:PD-X2-W2 / Y axis:PD-X4-W2 |
| Continuous thrust (N) | X axis:256.2 / Y axis:473.1 |
| Max. thrust (N) | X axis:1065 / Y axis:1892.3 |
| Optical encoder model | Renishaw RGH22, digital, 0.1um |
| Dust-proof way | X axis:metal cover / Y axis:Bellow dust-proof guard shield |
| Limit switch | Omron EE-SX674, EE-1010 |
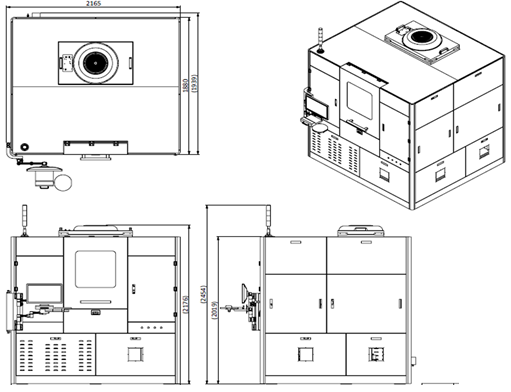
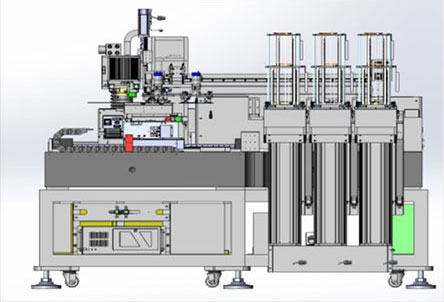
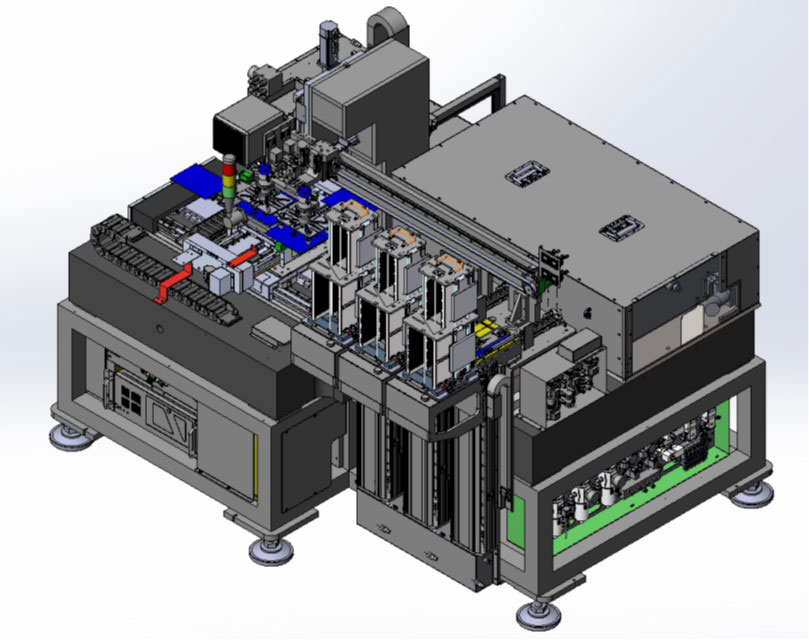
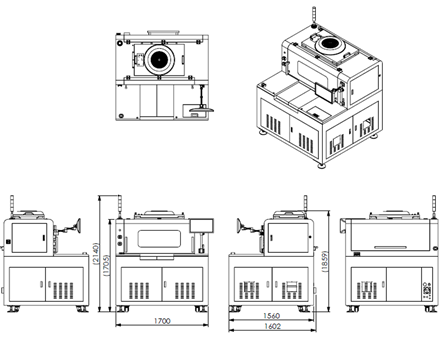
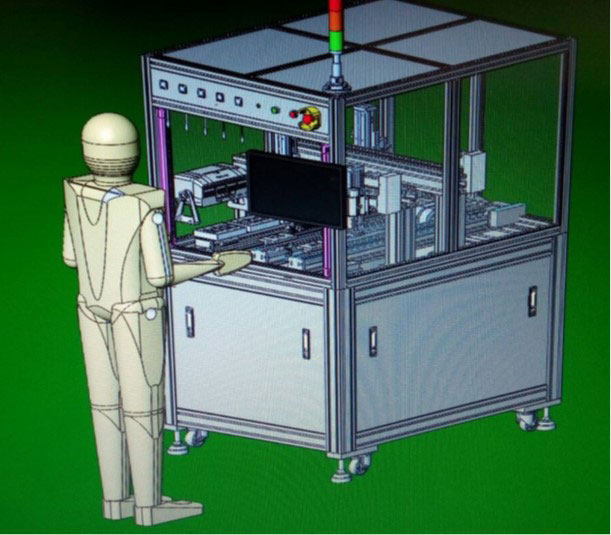
- Machine name: PICO IR Drilling and Scribing Equipment
- Work content: whole machine system integration (including mechanism, control, and distribution board)
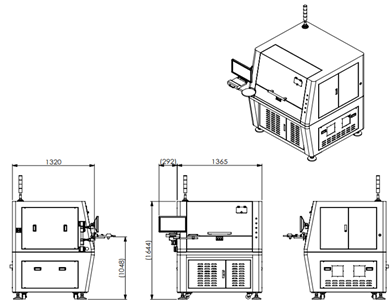
- Machine name: Laser Drilling& Scribing Equipment (CE compact new design) KF-X350-Y250-ROBOTSYSYTEM-Tonic
- Work content: whole machine system integration (including mechanism, control, and distribution board)
Specification
| Load (Kg) | 20 |
|---|---|
| Stroke(mm) | X axis:350 / Y axis:250 / Z axis:50 |
| Max. acceleration (m/s*2) | X axis:4(full stroke) / Y axis:4(full stroke) |
| Max. speed (m/s) | X axis:0.4(full stroke) / Y axis:0.4(full stroke) |
| Repeatability (um) | X. Y axis:±0.5 / Z axis:±5(single direction) |
| Absolute accuracy (um) | X. Y axis:±2.5(after compensation) |
| Flatness (um) | 8 |
| Straightness(um) | 8 |
| Orthogonality (um) | 10(300x250) |
| Limit switch | NPN, NC, 12-24V |
| Installation direction | Horizontal |
| Linear motor model | X axis:PE-X4-W2 / Y axis:PB-X5-W1 |
| Continuous thrust (N) | X axis:263.4 / Y axis:134.8 |
| Max. thrust (N) | X axis:1053.4 / Y axis:539.2 |
| Optical encoder model | Renishaw RELE20 (origin is 20mm from the edge), encoder body T1011**A+Ti 0200A20A-reading head+divider |
| Motion control card model | GTS-400-PG-VB |
| I/O expansion module model | ACC-S1616D |
| Drive model | GTHD-006-2AAP1 |
| Screen model | ASUS 18.5” VS197DE |
| Keyboard model | WK590 mini keyboard USB |
| Mouse model | Microsoft basic optical USB mouse (warship black) |
- Machine name: UV Fast Drilling Equipment KF-X550-V400-Y600-V400-BRIDGR-ROBOTSYSTEM
- Work content: whole machine system integration (including mechanism, control, and distribution board)

Specification
| Load (Kg) | X axis:20 / Y axis:10 |
|---|---|
| Stroke(mm) | X axis:550 / Y axis:610 / Z axis:50 |
| Max. acceleration (m/s*2) | X,Y axis:4(full stroke) |
| Max. speed (m/s) | X,Y axis:0.4(full stroke) |
| Repeatability (um) | X,Y axis:±1.5 / Z axis:±5 (single side) |
| Absolute accuracy (um) | X,Y axis:±2.5 (after compensation) |
| Flatness (um) | 10 |
| Straightness(um) | 10 |
| Orthogonality (um) | 10(300x300) |
| Limit switch | NPN, NC, 12-24V |
| Installation direction | X axis:side mount / Y axis:horizontal |
| Linear motor model | X axis:PE-X6-W2 / Y axis:PD-X2-W2 |
| Continuous thrust (N) | X axis:377.9 / Y axis:256.2 |
| Max. thrust (N) | X axis:1511.4 / Y axis:1025 |
| Optical encoder model | Renishaw RGH28, digital, 0.1um |
| Motion control card model | GTS-400-PG-VB |
| I/O expansion module model | ACC-S1616D |
| Drive model | GTHD-006-2AAP1 |
| Screen model | ASUS 18.5” VS197DE |
| Keyboard model | WK590 mini keyboard USB |
| Mouse model | Microsoft basic optical USB mouse (warship black) |
Non-Standard Automation Integration Performance
- Machine name: PCB mounter
- Main components: NIS-4U IPC/ Googoltech GTS-800-PG+GTS-400-PG
- Work content: whole machine system integration (including mechanism, control, vision, and distribution board)
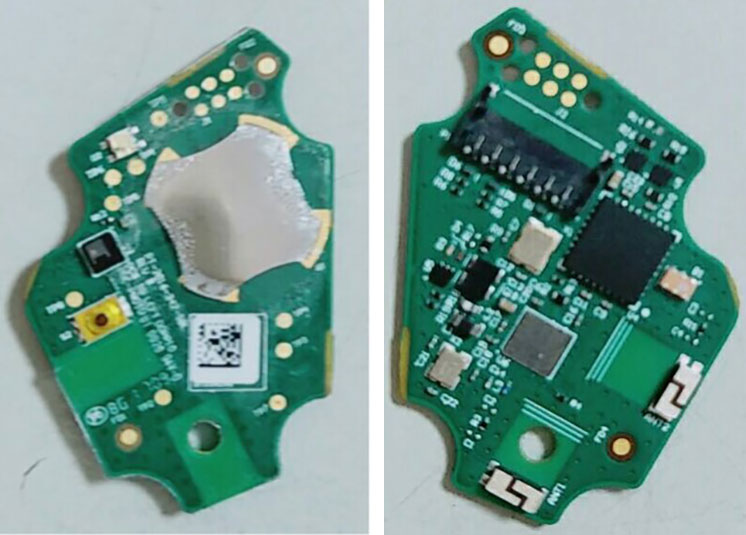
- Machine name: Passive Component Packaging Equipment
- Explanation: Design the automatic equipment according to customer’s problems: productivity, fix the problems of the old equipment
- Benefit: Increase productivity
- Content: changes of the discharge track design for the vibrating plate& modular design changes for suction and discharge
